TransformerBlock
class TransformerBlock(nn.Module):
def __init__(self, cfg):
super().__init__()
self.att = MultiHeadAttention(
d_in=cfg["emb_dim"],
d_out=cfg["emb_dim"],
context_length=cfg["context_length"],
num_heads=cfg["n_heads"],
dropout=cfg["drop_rate"],
qkv_bias=cfg["qkv_bias"])
self.ff = FeedForward(cfg)
self.norm1 = LayerNorm(cfg["emb_dim"])
self.norm2 = LayerNorm(cfg["emb_dim"])
self.drop_shortcut = nn.Dropout(cfg["drop_rate"])
def forward(self, x):
# Shortcut connection for attention block
shortcut = x
x = self.norm1(x)
x = self.att(x) # Shape [batch_size, num_tokens, emb_size]
x = self.drop_shortcut(x)
x = x + shortcut # Add the original input back
# Shortcut connection for feed-forward block
shortcut = x
x = self.norm2(x)
x = self.ff(x)
x = self.drop_shortcut(x)
x = x + shortcut # Add the original input back
return x
class GPTModel(nn.Module):
def __init__(self, cfg):
super().__init__()
self.tok_emb = nn.Embedding(cfg["vocab_size"], cfg["emb_dim"])
self.pos_emb = nn.Embedding(cfg["context_length"], cfg["emb_dim"])
self.drop_emb = nn.Dropout(cfg["drop_rate"])
self.trf_blocks = nn.Sequential(
*[TransformerBlock(cfg) for _ in range(cfg["n_layers"])])
self.final_norm = LayerNorm(cfg["emb_dim"])
self.out_head = nn.Linear(cfg["emb_dim"], cfg["vocab_size"], bias=False)
def forward(self, in_idx):
batch_size, seq_len = in_idx.shape
tok_embeds = self.tok_emb(in_idx)
pos_embeds = self.pos_emb(torch.arange(seq_len, device=in_idx.device))
x = tok_embeds + pos_embeds # Shape [batch_size, num_tokens, emb_size]
x = self.drop_emb(x)
x = self.trf_blocks(x)
x = self.final_norm(x)
logits = self.out_head(x)
return logits
附录知识
Loss Function 损失函数
用于量化模型预测值与真实值之间差异的函数,其核心目标是通过最小化该差异来优化模型参数。
-
评估性能:衡量模型预测的准确性,值越小表示预测越接近真实值。
- 指导优化:通过梯度下降等算法调整模型参数,使损失最小化。
- 问题类型:回归选MSE/MAE,分类选交叉熵/Hinge损失。
通过合理选择损失函数,可显著提升模型性能。例如,图像分类常用交叉熵,房价预测多用MSE。
Cross Entropy是信息论中用于衡量两个概率分布差异的重要指标
在分类任务中:
- 真实分布 P:通常是标签的 one-hot 编码(如真实类别为3,则 P=[0,0,0,1,0,…])。
- 预测分布 Q:模型输出的概率分布(如 Softmax 后的结果)。
交叉熵损失函数的目标是让预测分布 Q 逼近真实分布 P。其数学形式为:
- C:类别总数。
- yi:真实标签的第 i 个分量(0 或 1)。
- pi:模型预测的第 i 个类别的概率。(需满足 ∑pi=1)
Activation Function激活函数
Activation Function是神经网络中的核心组件,用于向网络引入非线性能力,使模型能够学习复杂的数据模式。激活函数的作用:
- 引入非线性:若无激活函数,多层神经网络等价于单层线性变换(W2(W1x+b1)+b2=W′x+b′),无法拟合复杂函数。
- 控制输出范围:如Sigmoid将输出压缩到(0,1),适合概率场景;ReLU将负值归零,增强稀疏性。
- 梯度传递:激活函数的导数影响反向传播的梯度,决定参数更新效率(如ReLU的梯度在正区间恒为1,缓解梯度消失)。
Sigmoid
- 输出范围:(0, 1)
- 优点:输出可解释为概率,适用于二分类输出层。
- 缺点:梯度消失:当输入绝对值较大时,导数接近0,导致深层网络难以训练。
- 应用场景:二分类输出层
Tanh(双曲正切)
ReLU(Rectified Linear Unit)
Leaky ReLU
Softmax
- 输出范围:(0,1),且和为1
- 特点:将输出转换为概率分布,用于多分类输出层(配合交叉熵损失)。
- 注意:输入值较大时可能数值溢出,需配合Log-Softmax或稳定化技巧。
表格:Softmax 计算示例
| 输入向量 | 最大值 | 调整后向量 | 指数值 | 总和 | Softmax 输出 |
|---|---|---|---|---|---|
| [1, 2, 3] | 3 | [-2, -1, 0] | [0.1353, 0.3679, 1.0] | 1.5032 | [0.09, 0.2447, 0.6653] |
| [4, 5, 6] | 6 | [-2, -1, 0] | [0.1353, 0.3679, 1.0] | 1.5032 | [0.09, 0.2447, 0.6653] |
def softmax(x):
x_max = np.max(x, axis=-1, keepdims=True)
exp_x = np.exp(x - x_max)
return exp_x / np.sum(exp_x, axis=-1, keepdims=True)
GELU
GELU核心思想是将确定性的阈值判断(如ReLU)转化为概率化的平滑决策。GELU在整个坐标系中是平滑的,特别是在 x<0时有轻微的弯曲,这使得它在神经网络中更有利于梯度流动。GELU的数学表达式为:

其中,Φ(x) 是标准正态分布的累积分布函数(Cumulative Distribution Function, CDF)。实际应用中常使用近似公式:

class GELU(nn.Module):
def forward(self, x):
return 0.5 * x * (1 + torch.tanh(torch.sqrt(torch.tensor(2 / torch.pi)) * (x + 0.044715 * x**3)))
激活函数选择指南
| 场景 | 推荐激活函数 | 理由 |
|---|---|---|
| 二分类输出层 | Sigmoid | 输出概率值,适配交叉熵损失。 |
| 多分类输出层 | Softmax | 输出归一化概率分布。 |
| 隐藏层(通用) | ReLU/Leaky ReLU/Swish | 计算高效,缓解梯度消失,适合深层网络。 |
| RNN/LSTM隐藏层 | Tanh | 零中心化,梯度幅度适中,避免输出漂移。 |
| 对抗死亡神经元问题 | Leaky ReLU/PReLU | 允许负区间梯度,保持神经元活性。 |
| 轻量级模型 | ReLU | 计算简单,节省资源。 |
优化器
用于调整模型参数以最小化损失函数的核心组件,其核心作用是通过梯度信息指导参数更新方向和步长。
SGD(随机梯度下降)
-
公式:
θ = θ - lr * ∇J(θ) -
特点:每次用单个样本或小批量样本计算梯度,更新参数。
-
优点:简单高效,适合大规模数据。
-
缺点:易陷入局部极小值,震荡明显。
optimizer = torch.optim.SGD(model.parameters(), lr=0.01)
Adam(Adaptive Moment Estimation)
为每个参数维护独立的自适应学习率:
# 使用Adam优化器(自动调整各参数的学习率)
optimizer = optim.Adam(model.parameters(), lr=0.001) # 初始lr仅作为参考基准
# 训练循环中,参数更新方式与SGD一致
optimizer.step()
内部机制:
- Adam 根据梯度的一阶矩(均值)和二阶矩(方差)动态调整每个参数的学习率。
- 实际更新公式:
param = param - lr * m_t / (sqrt(v_t) + eps)其中m_t和v_t是动量项。
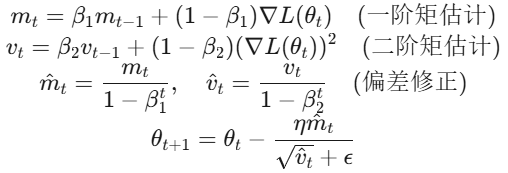
- 参数默认值:β1=0.9,β2=0.999,ϵ=1e−8
- 特点:
- 结合Momentum和RMSprop,自适应调整学习率。
- 适用于大多数深度学习任务,尤其是默认选择。
选择策略
| 优化器类型 | 适用场景 | 注意事项 |
|---|---|---|
| SGD/Momentum | 简单模型、需精细调参 | 需配合学习率调度器使用 |
| Adam/AdamW | 大多数深度学习任务(默认首选) | 注意权重衰减参数设置 |
| 自适应优化器 | 稀疏数据、特征分布差异大 | 避免用于RNN等动态网络结构 |
| 二阶优化器 | 小规模模型、需快速收敛 | 计算成本高,工业级应用较少 |
学习率
- 更新速度:高学习率(如0.1)可能导致训练不稳定甚至发散,低学习率(如0.001)会减缓收敛速度,易陷入局部最优。
- 稳定性:合理的学习率能帮助模型平稳收敛到全局最优或较好的局部最优
训练和推理过程中Attention的差异
1. 计算模式与并行性
训练阶段:
- 全序列并行处理:输入是完整的序列(如一个句子或段落),所有位置的 token 同时计算注意力权重,无需逐步生成。例如,输入序列长度为 ( n ),模型一次性计算所有 ( n \times n ) 的注意力分数。
- 完全利用硬件加速:通过矩阵乘法并行计算所有注意力头(Multi-Head),最大化 GPU/TPU 的并行计算能力。
推理阶段:
- 自回归生成(逐token生成):输出 token 逐个生成(如生成文本时,每次预测下一个 token)。每次生成新 token 时,只能计算当前 token 与之前所有 token 的注意力权重(因果注意力,Causal Attention)。
- KV 缓存优化:为避免重复计算,已生成的 token 的 Key(K)和 Value(V)会被缓存。每次生成新 token 时,只需计算当前 token 的 Q,并与缓存的 K、V 进行注意力计算,从而减少计算量。
2. 内存与计算复杂度
训练阶段:
- 内存需求高:需要存储完整的注意力矩阵(( n \times n )),以及中间梯度信息(如 Q、K、V 矩阵),导致显存占用随序列长度平方增长(( O(n^2) ))。
- 计算复杂度:注意力计算复杂度为 ( O(n^2 d) )(( d ) 为模型维度),对长序列(如 4096 token)显存压力极大。
推理阶段:
- 内存需求低:通过 KV 缓存,每次只需存储历史 token 的 K、V(缓存大小为 ( O(n d) )),无需保存完整的注意力矩阵。
- 增量式计算:每次生成新 token 的计算复杂度为 ( O(n d) ),整体复杂度仍为 ( O(n^2 d) ),但通过缓存减少重复计算。
3. 注意力掩码(Masking)
训练阶段:
- 因果掩码(Causal Mask):在自回归任务(如 GPT)中,使用下三角矩阵掩码,防止当前 token 关注未来信息。
- 填充掩码(Padding Mask):在批处理中,忽略无效的填充 token(如
[PAD])。
推理阶段:
- 仅需因果掩码:生成时天然满足因果性(未来 token 尚未生成),无需显式掩码,但需保证每次生成的 token 仅关注历史信息。
4. 参数更新与梯度计算
训练阶段:
- 反向传播:注意力权重(Q、K、V 的线性变换参数)需计算梯度并更新,需保留中间结果(如注意力分数、Softmax 输出)以支持梯度计算。
- 梯度检查点(Gradient Checkpointing):为节省显存,可能选择性丢弃部分中间结果,需要时重新计算。
推理阶段:
- 无梯度计算:参数固定,仅需前向传播,无需存储中间变量,显存占用更低。
5. 优化策略
训练阶段:
- 混合精度训练:使用 FP16/BF16 加速计算,结合梯度缩放(Gradient Scaling)避免数值下溢。
- 分布式训练:通过数据并行、模型并行或流水线并行拆分大模型。
推理阶段:
- 量化(Quantization):将模型权重从 FP32 转换为 INT8/INT4,减少内存占用和计算延迟。
- 稀疏注意力(Sparse Attention):对长序列裁剪部分注意力连接(如局部窗口注意力),降低计算复杂度。
6. 示例对比
训练阶段(输入序列长度 ( n=4 )):
- 输入:
[A, B, C, D] - 注意力计算:一次性计算所有 token 之间的注意力(包括
A→B,A→C,A→D,B→C,B→D等)。
推理阶段(生成序列 [A, B, C, D]):
- 生成
A:无历史信息,仅自身注意力(或初始提示)。 - 生成
B:计算B与A的注意力,缓存A的 K、V。 - 生成
C:计算C与[A, B]的注意力,复用缓存的 K、V。 - 生成
D:计算D与[A, B, C]的注意力,复用缓存。
总结
| 维度 | 训练阶段 | 推理阶段 | | ———— | ————————– | ————————- | | 计算模式 | 全序列并行计算 | 自回归生成,逐 token 计算 | | 内存占用 | 高(存储完整注意力矩阵) | 低(依赖 KV 缓存) | | 掩码机制 | 因果掩码 + 填充掩码 | 隐式因果性(仅关注历史) | | 参数更新 | 梯度计算与参数优化 | 参数固定,仅前向传播 | | 优化目标 | 最大化并行效率与显存利用率 | 最小化延迟与内存占用 | | 典型技术 | 混合精度训练、梯度检查点 | KV 缓存、量化、稀疏注意力 |
训练和推理的核心差异在于:
- 训练追求高吞吐量和参数优化,需处理完整序列并保留中间结果;
- 推理追求低延迟和资源效率,需增量生成并复用历史信息。